Hi,
sehr interessant, auch für Laien wie mich.
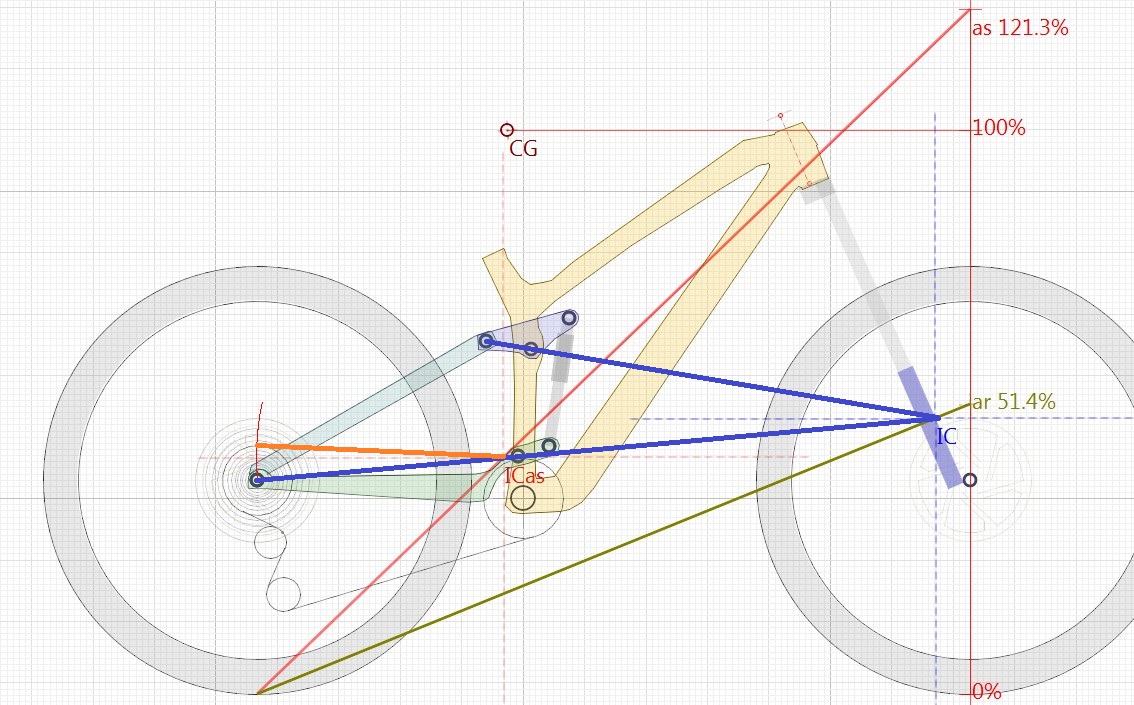
Ich glaube ebenso, dass die Raderhebungskurve einen spürbaren Einfluss auf die Federungsperformance des Hinterbaus hat. Das Anti-Squat halte ich nicht für so extrem wichtig, dass man noch zusätzliche Kettenblätter anbaut und ggf. die ganze Optik verhunzt. Wer soll denn dieses Bike mal fahren? Ich behaupte einfach mal, dass für die große Mehrheit der Biker ein Anti-Squat mittels Lockout am Dämpfer völlig ausreicht - da hat man echtes Hardtail feeling. Bei langen Anstiegen ist das eigentlich unverzichtbar und technisch simpel. Für kurze Sprints an der Wurzel Rampe ist es für einen Hobby Biker wurscht ob er eine 10tel Sekunde schneller oder langsamer ist, weil die Kräfte effektiver umgesetzt werden.
Am Ende des Tages sollte auch ein schönes Bike entstehen und häufig sind einfachere Konstruktionen schöner anzusehen, als irgendwelche komplexen, die rein rechnerisch ganz toll sind. Ausserdem spielt auch das Gewicht, ungefederte- und bewegte Massen eine Rolle. Die 10tel Sekunde an der Rampe verliere ich wieder wenn das Bike wegen vieler Lager, Umlenkrollen etc. 1/2 kg mehr wiegt. Nicht zu vergessen, je mehr bewegliche Teile an einem Radl, um so mehr kann auch kaputt gehen - vom Wartungsaufwand mal ganz abgesehen.
VG, Claus




")