Hallo Zusammen,
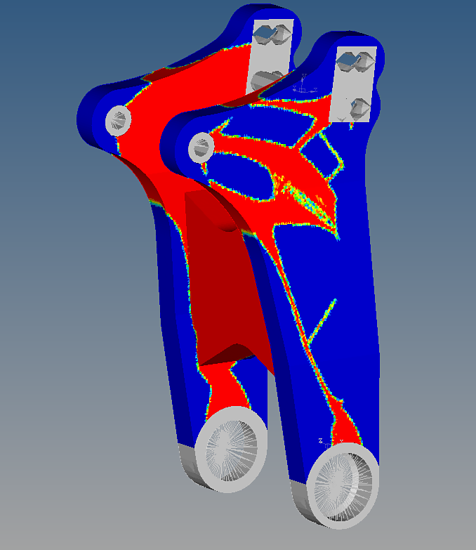
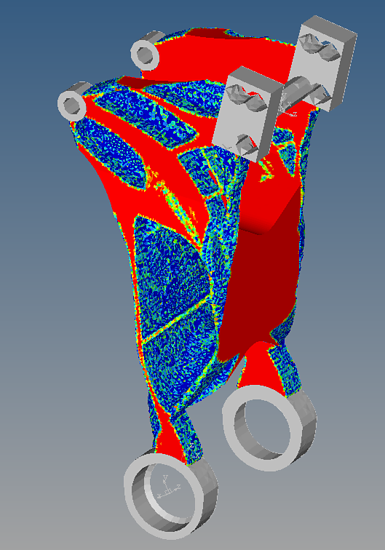
ich habe die Wippe mal spaßeshalber durch ein Topologie-optimierungs-Tool gejagt bzw. den theoretischen Bauraum davon, und das hier ist das Ergebnis:

Ein paar Erklärungen dazu (die FE-Theorie-Fachleute hören jetzt bitte kurz weg):
So eine Optimierung funktioniert im Prinzip wie FEM-Analyse rückwärts: Man gibt dem Programm einen Bauraum vor und Randbedingungen (Lager, Lasten etc.) und ein Optimierungsziel wie z.B. maximale Steifigkeit. Dieser Bauraum wird dann mit finiten Elementen vernetzt, die Randbedingungen aufgebracht und das Programm ermittelt, welche Elemente in diesem Netz viel oder wenig Last abbekommen. Diejenigen, die wenig Last abbekommen, sind eher unnötig als die mit viel Last. So wird eine -für den definierten Lastfall- optimale Materialverteilung ermittelt.
In dieser Wippe habe ich die Randbedingungen folgendermaßen definiert:
1.) Natürlich eine Lagerung unten, welche Drehungen um die Lagerachse zulässt, aber keine weitere Rotation oder Verschiebung
2.) Lasten auf die Aufnahme der Schubstreben ungleichmäßig (rechts mehr als links) und zusätzlich eine Querkomponente
3.) Lagerung an der Dämpferaufnahme, nur die Verschiebung nach Vorne ist gesperrt, alle anderen Freiheitsgrade ungesperrt
4.) Zusätzlich dazu habe ich noch eine Symmetriebedingung gesetzt, und eine "Draw-Direction" also eine Entformrichtung von der Mitte aus nach aussen.
Was man an dem Ergebnis erkennen kann:
1.) Das ursprüngliche Design ist von der Verteilung her schon relativ gut
2.) Der Haupt-Lastpfad läuft von den Schubstreben zum Lager, um die Asymmetrie der Lasten dort abzufangen. Die Dämpferanbindung soll ja von der Asymmetrie der Lasten nichts abbekommen. Dadurch entsteht so eine Art "Banane"
3.) Der Optimierer hält es anscheinend für eine gute Idee, den Hohlraum in der Mitte noch durch ein diagonales Schubfeld zu verstärken. Inwieweit das fertigungstechnisch zu bewerkstelligen ist, muss jemand anderes klären ;-)
Natürlich ist dieses Ding weit davon entfernt, ein fertiges Bauteil zu sein, viele Stellen sind so nicht herstellbar. Aber vielleicht kann es ja dem ein oder anderen als Inspirationdienen, viel mehr als das kann so eine Optimierung in der ersten Iteration garnicht bieten...
ich habe die Wippe mal spaßeshalber durch ein Topologie-optimierungs-Tool gejagt bzw. den theoretischen Bauraum davon, und das hier ist das Ergebnis:
Ein paar Erklärungen dazu (die FE-Theorie-Fachleute hören jetzt bitte kurz weg):
So eine Optimierung funktioniert im Prinzip wie FEM-Analyse rückwärts: Man gibt dem Programm einen Bauraum vor und Randbedingungen (Lager, Lasten etc.) und ein Optimierungsziel wie z.B. maximale Steifigkeit. Dieser Bauraum wird dann mit finiten Elementen vernetzt, die Randbedingungen aufgebracht und das Programm ermittelt, welche Elemente in diesem Netz viel oder wenig Last abbekommen. Diejenigen, die wenig Last abbekommen, sind eher unnötig als die mit viel Last. So wird eine -für den definierten Lastfall- optimale Materialverteilung ermittelt.
In dieser Wippe habe ich die Randbedingungen folgendermaßen definiert:
1.) Natürlich eine Lagerung unten, welche Drehungen um die Lagerachse zulässt, aber keine weitere Rotation oder Verschiebung
2.) Lasten auf die Aufnahme der Schubstreben ungleichmäßig (rechts mehr als links) und zusätzlich eine Querkomponente
3.) Lagerung an der Dämpferaufnahme, nur die Verschiebung nach Vorne ist gesperrt, alle anderen Freiheitsgrade ungesperrt
4.) Zusätzlich dazu habe ich noch eine Symmetriebedingung gesetzt, und eine "Draw-Direction" also eine Entformrichtung von der Mitte aus nach aussen.
Was man an dem Ergebnis erkennen kann:
1.) Das ursprüngliche Design ist von der Verteilung her schon relativ gut
2.) Der Haupt-Lastpfad läuft von den Schubstreben zum Lager, um die Asymmetrie der Lasten dort abzufangen. Die Dämpferanbindung soll ja von der Asymmetrie der Lasten nichts abbekommen. Dadurch entsteht so eine Art "Banane"
3.) Der Optimierer hält es anscheinend für eine gute Idee, den Hohlraum in der Mitte noch durch ein diagonales Schubfeld zu verstärken. Inwieweit das fertigungstechnisch zu bewerkstelligen ist, muss jemand anderes klären ;-)
Natürlich ist dieses Ding weit davon entfernt, ein fertiges Bauteil zu sein, viele Stellen sind so nicht herstellbar. Aber vielleicht kann es ja dem ein oder anderen als Inspirationdienen, viel mehr als das kann so eine Optimierung in der ersten Iteration garnicht bieten...
")


") Ich hätts auch nicht wirklich schmieden wollen.
Ich hätts auch nicht wirklich schmieden wollen.