@foreigner
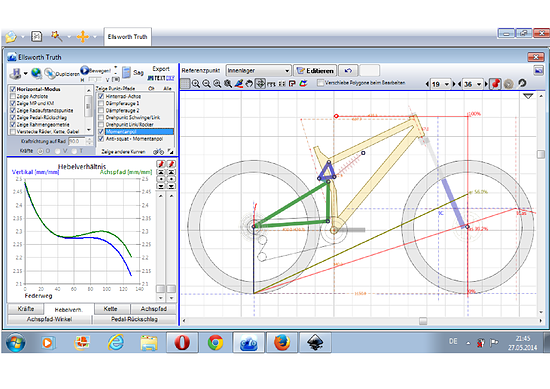
Ich glaub ich steh auf dem Schlauch, aber von welchem Rahmen ist die erste Kräfte-Kurve?
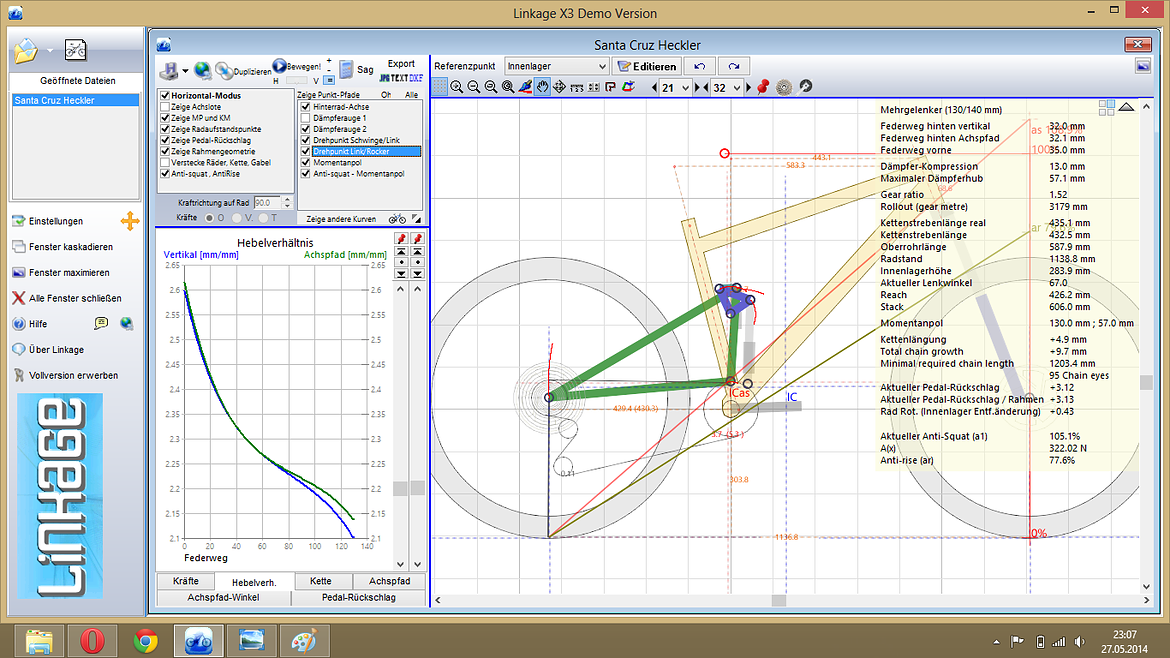
Grundsätzlich finde ich deinen Ansatz gut, zumal umgelenkte Eingelenker sehr viel Pop entwickeln können und damit sehr spassig zu fahren sind. Ich schmeiß mal das Last Herb in die Runde, dessen Hinterbau zeigt was machbar ist.
Kannst du den Bereich von 40 - 110mm zumindest mit leicht steigender Kurve erstellen - so ist das eigentlich degressiv. Außerdem könnte man die Endprogression abflachen damit der Hinterbau nicht zu grob abgefangen wird.
Nicht falsch verstehen - ich poste das nur weil ich deinen Ansatz richtig gut finde!
Ich glaub ich steh auf dem Schlauch, aber von welchem Rahmen ist die erste Kräfte-Kurve?
Grundsätzlich finde ich deinen Ansatz gut, zumal umgelenkte Eingelenker sehr viel Pop entwickeln können und damit sehr spassig zu fahren sind. Ich schmeiß mal das Last Herb in die Runde, dessen Hinterbau zeigt was machbar ist.
Kannst du den Bereich von 40 - 110mm zumindest mit leicht steigender Kurve erstellen - so ist das eigentlich degressiv. Außerdem könnte man die Endprogression abflachen damit der Hinterbau nicht zu grob abgefangen wird.
Nicht falsch verstehen - ich poste das nur weil ich deinen Ansatz richtig gut finde!
")



